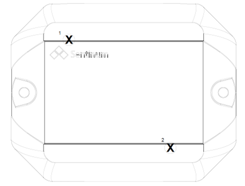
Technical drawing
Juno ( without TH)

Juno TH ( without opening)

Adhesive pad technical drwaing

Intelligent use of different tracking technologies for energy optimization
We combine various tracking technologies for precise and energy-efficient location determination: Wi-Fi SSID Scan, GNSS, GNSS Scan and Cell Locate. Each of these technologies has specific strengths that we use flexibly and depending on the situation.
- Wi-Fi SSID Scan detects Wi-Fi networks available in the vicinity and determines a position based on known SSID locations. This method is extremely energy-efficient and enables fast location updates - ideal in urban areas with dense Wi-Fi coverage.
- GNSS (Global Navigation Satellite System, e.g. GPS) offers very precise positioning, but is very energy-intensive in comparison. GNSS is therefore only activated when other methods do not provide sufficiently accurate data.
- With GNSS Scan, satellite data is only collected and the position calculation is optimized without permanently maintaining an active GNSS session. This also saves considerable energy compared to permanent GNSS use.
- Cell Locate enables positioning based on mobile radio cells. This method is available globally and provides a rough but continuous location determination even if there is no WLAN or GNSS signal.
Intelligent control and prioritization - such as the preferred use of Wi-Fi scans - can significantly reduce the device's energy consumption. Only when Wi-Fi or cell positioning is not sufficient does the device automatically switch to GNSS or other more precise methods.
All tracking strategies and fallback mechanisms are individually configurable so that the best balance between energy efficiency, accuracy and availability can be selected for different applications and regions.
Even if individual technologies vary depending on the environment, this flexible combination enables virtually seamless and detailed route recording worldwide.
We also offer suitable solutions for indoor scenarios where GNSS signals are often unavailable or inaccurate. The Wi-Fi SSID scan and the use of known indoor access points make it possible to reliably determine the position even inside buildings. Optionally, indoor positioning can be supplemented by additional technologies such as Bluetooth Low Energy (BLE) beacons or inertial sensors.
This enables precise location determination even in complex environments such as shopping centers, airports or industrial halls - seamlessly integrated into the existing tracking concept.

The following providers can be recommended for decoding the WIFI SSID SCAN and GNSS SCAN data:
- Semtech LoRa Cloud (discontinued at the end of July 2025)
- AWS
- Tencent
- Traxmate
- Sentinel
Local databases can be used for on-prem applications


|
Item number |
Approved batteries |
|
S-JUNO(-iX)-LOEU/MIOTY S-JUNO(-iX)-LOEU/MIOTY-TH S-JUNO(-iX)-LOEU/MIOTY-TRACK S-JUNO(-iX)-LOEU/MIOTY-TH-TRACK S-JUNO(-iX)-NBM1-TRACK-2 S-JUNO(-iX)-NBM1-TRACK-3 S-JUNO(-iX)-NBM1-TH-TRACK-2 S-JUNO(-iX)-NBM1-TH-TRACK-3 S-JUNO-NB-TH
|
 |
To activate the sensor, hold a commercially available magnet to the point marked X. A neodymium magnet with a minimum surface area of 1 cm² is recommended. The magnet must remain in place for at least 2 seconds until the device is activated. This is acknowledged with a beep.



First locate the tag on the sensor and then the reader on your end device. The position of the NFC tag can be found at the position of the orange arrow.

The location of the tag is also marked on the top and labeled "Tap here". You can also see the position of the NFC tag in the technical drawing.
Open the app and activate the sensor. To start the sensor in the basic settings, click on the "Activate sensor" button in the app's start menu. Now place your device on the NFC mark on the sensor.
When the sensor is activated, "Sensor updated!" is displayed. You can then continue with the activation of the other sensors.



Commissionning the sensor via BLE







Communication with the interface
The option to configure the sensor communication and the join behavior can be found in the respective generic LoRaWAN® , Mioty® or Cellular (NB-IoT and LTE-M1) documentation, depending on the version.
You can also find all documents relating to generic documentation at https://docs.sentinum.de/wichtig-produktübergreifende-dokumentation-für-sensoren.
Battery change
- Open the 4 screws on the back of the sensor marked with the orange arrows. You will need a Torx T10 screwdriver for this and make sure that the seal is not damaged.

-
Remove the back of the sensor housing. Check that the seal is in place and take care not to damage it when opening it

-
Remove the old batteries from the battery holder.

-
Insert 2 new battery cells. If cells other than those recommended are used, performance and product safety may be impaired and the running times and performance specified in the data sheets may not be achieved. After insertion, the sensor should start with a short beep. As soon as you hear this signal, replace the back of the housing.

-
Place the rear panel back on the top of the housing. Make sure that the seal is properly seated and that the housing can be closed properly.

- Screw the housing together. Tighten the screws crosswise to ensure even and tension-free fastening. Make sure that the original position of the seal has not been changed. Then reinstall the sensor at its place of use. Dispose of the old batteries in an environmentally friendly manner.

Flap openning detection and TILT detection
The flap opening detection can be carried out either via the magnetic switch or the acceleration sensor. Tilt detection (tilt feature) is carried out via the acceleration sensor.
Flap detection VIA the magnetic switch
Orientations

LoRaWAN specific features
LoRaWAN Join behavior
Before telemetry data can be sent via LoRaWAN, the device must establish a connection with the network. To do this, the device sends join requests until a join accept has been successfully received. As a compromise between energy consumption and a fast join, the transmission intervals of the join requests become longer and longer. In addition, the data rate is also varied (initially large data rate or small spreading factor, then smaller data rate or larger spreading factor). The join behavior strictly adheres to the specifications and recommendations of the LoRa Alliance specification. Sentinum sensors implement the specifications by means of so-called join bursts, the distance between which increases.
A join burst consists of a maximum of 6 join requests with decreasing data rate (DR5-DR0) or increasing spreading factor (SF7-SF12). The intervals between the requests increase quadratically in order not to violate the Lora-Alliance specific duty cycle guidelines. The LoRa Alliance prescribes a decreasing duty cycle for join requests according to the following table Time duty cycle <1h 1% <11h 0.1%
This means that in the first phase (<1h) the same amount of transmission budget is available as in the second (<11h), although only a tenth of the time is available. In order to make maximum use of the budget, the intervals between join bursts (consisting of max. 6 join requests) are initially small and then become larger. Specifically, 2 bursts are carried out in phase 1. In phase 2, 2 further bursts are carried out, and from phase 3 onwards, 1 burst is carried out per day. The length of the bursts increases from approx. 10 minutes in phase 1, to approx. 100 in phase 2, to up to 16 hours in phase 3.
Specifications subject to change without notice. All information provided without guarantee.
![]()
![]()
![]()
![]()
![]()
![]()

